System Overview
The purpose the system serves is to combine mobility assistance with way-finding. Thus, the intended setup of the product is to be available for use for travelers after passing airport security. From there, IAN can scan the traveler's boarding pass, provide them with their flight information and take them to their desired destination in the airport.
System Features
Autonomous Navigation
Our system features fully autonomous navigation. Designed with safety and efficiency in mind, it finds the best path to the destination while also integrating obstacle avoidance and smart pathing. This ensures that all requests are fulfilled quickly and that the user is safe and comfortable for the whole duration of the journey.
Smart UI
IAN is operated through our smart UI. Built to satisfy the latest user experience guidelines, our smart UI is accessible to everyone, featuring: large icons, easy-to-follow text, real-time flight information, live notifications and daltonism friendly color schemes.
Safety & Comfort
Comfort and safety are our utmost priorities. As such, we worked very closely with experts to design a product that, not only is secure and safe, but also provides the user with much-needed comfort.
A new study by the Transportation Research Board’s Airport Cooperative Research Program shows that elderly passengers’ ability to navigate airports is negatively affected by various aging-related issues. Two of the most prevalent challenges aging travelers face in airports are way-finding and fatigue.
2. Growing Demand for Special AssistanceAccording to the 2017/18 Accessibility Report, in 2017 alone, over 3 million requests were made for assistance at UK
airports. That number is only expected to rise at a rate of around double that of the general passenger growth.
Furthermore, the 2018/19 Accessibility Report reports that a
record 3.7 million passengers were assisted at 31 UK airports between 1 April 2018 and 31 March 2019.
Since 2014 the number of passengers assisted increased by 49% while overall passenger numbers increased by 25%.
Current arrangements in UK airports have proven to be quite poor in terms of customer satisfaction.
The 2017/18 Accessibility Report states,
"Disappointingly we have classified London Gatwick, London Stansted, and Birmingham as 'needs improvement'
and one airport, Manchester, as ‘poor’. Information provided to us shows that disabled passengers and those
with reduced mobility took significantly longer to move through the airport than other passengers, with an unacceptable
number of disabled and reduced mobility passengers waiting more than twenty minutes for assistance with, in some cases,
passengers left waiting for assistance for more than an hour".
The tells us that the current means of assistance do not ensure a 100% customer satisfaction as they heavily rely on human involvement.
While there are several robotic assistants on the market, none of them are targeted specifically towards the elderly. Examples of such products include KLM Care-e, which can assist with carrying luggage but this does not address the issue of exhaustion while navigating a large airport. Another example is that of AIRSTAR, the robotic assistant present at Incheon, South Korea. While it is able to give indications to travelers and even guide them to their destination, it still does not address the aforementioned issue.
System Use Cases
Use Case 1
John is 65 years old and he traveled for hours to reach the airport for his flight.
He is feeling exhausted and the airport is large. His gate and restaurants are a long way
from airport security and he would appreciate some help getting there.
However, he did not request special assistance prior to his arrival, and hence does not have priority and will have to wait until a member of staff becomes available.
John uses IAN to take him to any point of interest within the airport without the need for human involvement.
Use Case 2
Jane is 70 years old and has just arrived in the airport for her flight.
Most airports make her nervous as she is always having a hard time navigating them, in particular she struggles with finding her way to
the restaurants and toilets. Jane uses IAN, chooses her desired point of interest and she is comfortably taken there.
She is relieved that she doesn't need to ask around or keep looking at the signs to find her way. IAN has also informed her of a change in her flight status,
saving her the stress of constantly looking out for new updates from airport staff.
System Functionality
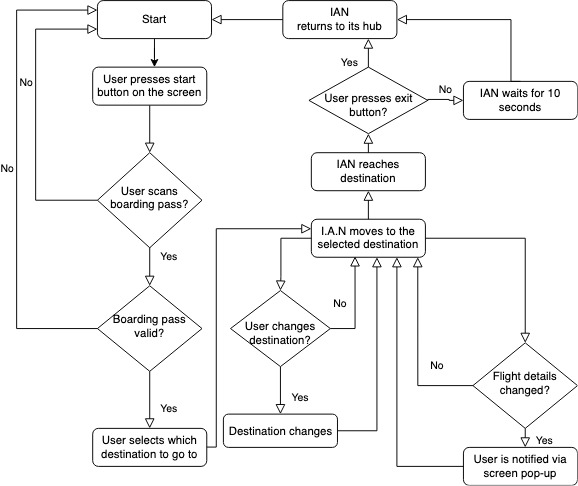
The intended functionality of our system is demonstrated by the flow chart below.
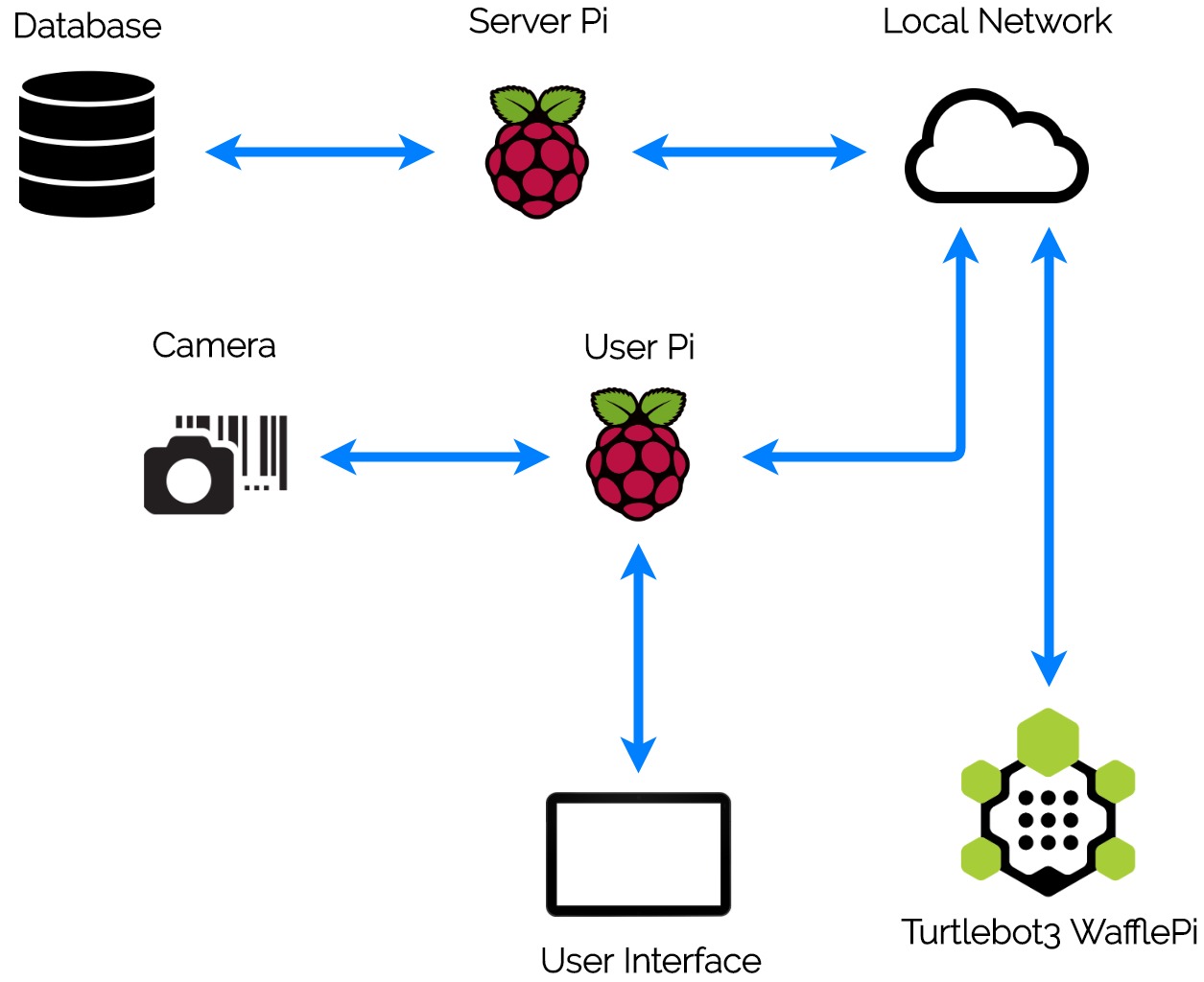
System Components
Our system is currently composed of the following components:
• The Turtlebot and its Raspberry Pi - contains the core navigation logic.
• The User Pi - a Raspberry Pi needed by the Turtlebot Pi to act as the ‘master’ for the Turtlebot’s navigation.
• The Server Pi - a Raspberry Pi that contains the database and acts as an airport server.
• The UI - lives on the User Pi and is displayed on a 7" touchscreen.
• The Camera - acts as a barcode scanner; scans boarding passes, and is connected to the User Pi.
• The User Seat - built on top of the Turtlebot.
System Demonstration
On the left, you could find a video demonstrating how our system works.
On the right, you could interact with our UI that is demonstrated in the video.
User Guide
You can have a look at our user guide for building and trialling the prototype of the system.For the 4th sprint, pre-COVID-19, we had started preparing a Python script that recieves a video stream from a camera located in the gap between the back support of the user seat and the seat foundation. The purpose of this setup is to detect when the user is sitting down and when they are not - depending on the light intensity the camera recieves. This was supposed to be a safety feature to ensure the robot never moves when it's unsafe to do so.
Navigation EnhancementsDuring our scalability research we came across a more efficient Navigation algorithm, which will allow our robot to navigate obstacles in a safer, more realistic way – given a sufficient amount of time and resources. Our research suggests that Generalized Voronoi Diagrams (GVD) could be applied to Turtlebot navigation in ROS. Without going into technical details, this research concluded that the current implementation, using Dijkstra’s method, might force the robot to abort if an obstacle were to appear when the robot was turning, whereas the GVD algorithm would plan a safe route around it. This research is particularly relevant to our system since airports have many corridors, and thus IAN would have to make turns frequently.
Navigating Multiple FloorsA potential further development of IAN is to navigate buildings with multiple floors. Multiple airports host restaurants and shops on different building floors than the departure gates. One way to do this is to incorporate IAN's functionalities with airport lifts, although this would require further research.
Multiple LanguagesAvailable only in English now, one of the next steps we intend to take is to make our product accessible for everyone from around the globe. For this, we plan to integrate many more languages, such that any traveler, no matter which language they speak, would have a similar level of accessibility to IAN.
Voice commands & Text-to-speechWhile designed with the elderly in mind, our product range could be expanded to provide assistive services to other groups. One of our main future goals is to make airports more comfortable for those who are visually impaired. With some modifications, we plan to adapt the current product to include voice accessibility and screen reading such that those who have sight difficulties would have a similar level of accessibility to IAN
Market TransferabilityAs of now, our primary customers are airports. However, IAN can easily be adapted to satisfy different market segments. From insurance companies that provide services to injured workers to firms that want to make their offices accessible to their disabled employees, we can vouch that IAN has the potential to fulfill all requests of special assistance in a building environment.
Airports provide many accessibility features but sometimes they can be hard to access and may need booking in advance. IAN provides assistance as soon as you pass security without needing a reservation.
Attracting More CustomersAirports can be daunting to those with fatigue challenges and way-finding difficulties. Making airports more accessible and easy to navigate can only encourage those customers to air travel more frequently.
Reduced CostsUnder European Law airports are required to provide special assistance to passengers, free of charge. Each airport calculates a passenger with reduced mobility (PRM) charge which is included in the airport tax. Our product can help passengers move to specified locations without the need for staff involvement and help airports reduce special assistance related costs.
After analyzing the average salaries of on-the-ground airline staff (of which those providing the wheelchair service are a subset) and estimating the likely costs of our products' manufacturing and maintenance, we speculate that having IAN as part of an airport's ecosystem could reduce net costs by hiring less airline staff to provide such assistance. Further details in the Business Plan
Navigation
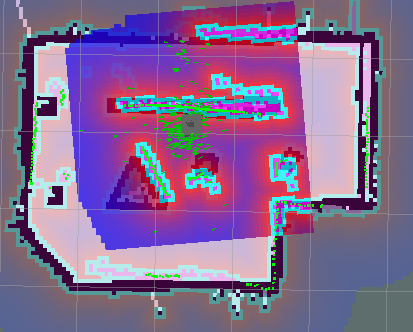
1. Making a Map
The SLAM (Simultaneous Localization and Mapping) is a technique to draw a map by estimating the
current location in an arbitrary space. Using SLAM we can create a 2-D occupancy grid map (like a building floorplan)
from laser and pose data collected by a mobile robot. The result of this operation was the map used for navigation.
2. Navigation with RViz
The goal of navigation is to move the robot from a location to a specified destination
in a given environment. For this purpose, a map that contains the geometric information of objects
and walls of the given environment is required. As described earlier, using SLAM, the
map was created with the distance information obtained by the sensor and the pose information of the Turtlebot itself.
In this phase, we used RViz to:
• estimate the initial position: for the Turtlebot to navigate autonomously inside the area of the given map,
the initial position of the Turtlebot must be given. This was done using the visual tool RViz by drawing an arrow in the map
to determine the orientation and position of the Turtlebot inside the environment.
• send the navigation goal: similiar to the initial position estimate, RViz is used to draw an arrow in the map
to determine the goal position and orientation of the turtlebot.
The Turtlebot will create a path to avoid obstacles to its destination based on the map and data from its sensor.
Then, the Turtlebot moves along the path. At this time, even if an obstacle is suddenly detected,
the Turtlebot moves to the target point avoiding the obstacle.
3. Parameter Tuning
One of the most difficult challenges we faced in the Navigation team was improving
the navigation's behavior. Even though the navigation was functional, it was not accurate.
To alleviate that, we had to tune certain parameters which proved to be a challenging task as we had to constantly
evaluate the effect of each parameter. Our goal was to establish a combination of parameters that would provide
the optimal navigation behavior. In technical terms, the job of the navigation package is to produce a safe path
for the Turtlebot to execute, by processing data from odometry, sensors and the environment map.
Optimizing the performance of this navigation package requires some fine-tuning of these parameters.
Tuned parameters include:
• sim_time: the time allowed for the robot to examine each possible velocity value and pick the highest-scored trajectory.
• path_distance_bias: is the weight for how much the local planner should stay close to the global path. It makes
the navigation smoother as it is more attached to the global planner's path.
• yaw_goal_tolerance: the tolerance in radians for the controller in rotation when achieving its goal.
• xy_goal_tolerance: the tolerance in meters for the controller in the x and y distances when achieving a goal.
• max_vel_x, min_vel_x: range of the velocity the robot can take.
• inflation_radius, cost_scaling_factor: the two parameters control how far the robot aims to be from obstacles while it moves. The first controls
how far away the zero cost point is from the obstacle. The second is inversely proportional to the cost of a cell.
4. Navigation Scripting
The next step after the navigation optimization was to replace the visual tool RViz, which allowed us to publish the initial position as well as the destination manually.
The Python scripts we have written use packages like rospy, move_base_msgs.msg, actionlib, actionlib_msgs, and geometry_msgs to manipulate
the message types for publishing. These libraries give us access to the message parameters.
The actionlib library allows us to create a client Node to the MoveBaseAction interface. Essentially,
the MoveBaseAction accepts goals from clients and attempts to move the Turtlebot to the specified position/orientation in the world.
Using the client node, we create a goal message and publish it to that interface, which is essentially commanding the Turtlebot
to move towards that goal.
With the same reasoning, we used the relevant interfaces to publish the initial position of the Turtlebot.
For the pausing functionality, we are using the MoveBaseAction interface to cancel all the goals given to the turtlebot
and just resend the previous destination when the user resumes.
Since we have the navigation node running behind the scenes we do not need to write an external script for the robot to plan a
route to the destination, avoid obstacles and in general plan its movements smartly. We took advantage of the amcl module
that does that for us by just publishing the end goal and by allowing the module to do the rest (i.e. plan a route for the robot).
The only thing the scripts have replaced is the need to use the visual tool RViz to pinpoint the initial position and the goal location/orientation.
5. Live Location Tracking
The last milestone of the Navigation team was to broadcast the location of the Turtlebot
in a map in the UI while navigating. However, this proved to be another challenge as there were no already-existing
packages for a live-tracking feature, so this was manually implemented by the team. Using the ROS topic, /move_base/feedback,
we were able to receive the Turtlebot's location during navigation
from the Turtlebot's own map of the arena. We also had a model map of the arena on the UI. We scaled and normalized the two maps in
order to broadcast the Turtlebot's location onto the UI map.
DB/Scanning
1. Scanning Setup
We are using a Logitech Webcam to act as a barcode scanner.
The passenger can scan their boarding pass's barcode and the system will use
that to retrieve their flight information from the DB on the Server PI.
We are using the pyzbar package to decode the bardcodes and use for the DB queries

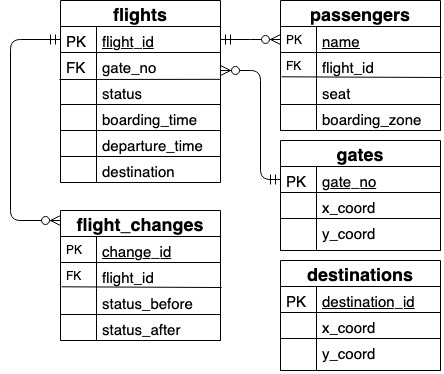
2. The Database
The image on the left shows the final structure of our DB. Initially we had the DB on the User Pi
for easy access, but upon feedback from the SDP team, we later moved it to a different Pi (the Server Pi) to mimic the
real-world situation where the DB would live on a remote server.
3. User Pi and Server Pi Communication
The next step after the migration of the DB on the Server Pi was to establish a secure and reliable communication channel between the User Pi and the Server Pi
in order to perform the read and query operations.
4. Live Updates
An important functionality of our product is to notify the user that a change has occurred to their flight.
To accomplish that, we have the Server Pi "listening" for any change in the records of the DB that concern the current user of the system.
If there is a change in their flight information, the Server Pi writes those changes to a file in the User Pi. Similar to the Server Pi,
the User Pi is "listening" for a modification in that file. As soon as it detects that the file has been modified, it updates the current user
using a pop-up window in the UI.
5. Challenges
A particular challenge faced by the DB/Scanning team was getting the User Pi and the Server Pi to
communicate harmoniously in order to provide the user with live updates when the user's flight information change.
The arrangement for the communication, initially, was TCP using sockets. The problem with here is that the network the two Pi's would
communicate over was supported by multiple routers. As such, the TCP socket communication, in particular, would work at times and wouldn't work at other times depending on
the location of the two Pi's in the room.
Because of this unpredictability, we found another method that is not disturbed by the multi-router setup for communication. The method involved sharing the SSH-keys of the Pi's with each other and communicating by the means of SSH sessions. For example, when the User Pi scans the boarding pass, it would SSH into the Server Pi with the flight and user id's, to run a script that constantly scans for changes to the user flight.
User Interface
Users interact with IAN using a simple, modern-looking UI on a Pi touchscreen. We created the UI using Qt, a free, open source, cross platform toolkit, and its Python bindings PyQt.
We designed the UI using the QtDesigner tool and integrated the backend code with the other functionality of IAN (scanning, database retrieval, navigation) with several Python scripts.
We focused on usability - using a large sans serif font for readablity and symbols over words.
We chose colours suitable for colourblind users, and included a help page and a call for help button. These steps ensure IAN is
intuitive as possible for the elderly.
You can interact with our UI on the right.
Autonomous navigation is the most significant functionality of our product.
For this reason, it was under regular re-evaluation and improvement.
Basic Navigation Functionalities
1. Test Purpose
The navigation functionality needed to reach an acceptable standard to be formally evaluated against our product's set standards.
2. Test Procedure
Initially, even though the Turtlebot's navigation was functional,
we noticed that the planning and movement of the robot were inaccurate.
The robot failed to reach its given destination, kept hitting the walls and obstacles even though
they were clearly shown on the sensor map, went past the goals without stopping or was unable to assume the instructed orientation.
For us to overcome these issues, the Navigation team had to constantly experiment with the Navigation Parameters (see the "How it Works" section).
With each tuning, we informally evaluated the performance of the navigation and repeated the process.
3. Test Results
After a lot of experimentation and informal evaluation of the navigation behavior,
the team established a combination of parameters that would provide the optimal navigation behavior.
Consistency in Travel Time
1. Test Purpose
The next step was to evaluate the consistency of the travel time of the Turtlebot.
We needed to ensure that the Turtlebot will be consistent in its travel time as well as the path chosen for
any given destination assuming the same initial position and environment. Have in mind that between the second and third sprint,
the user seat and an extra level was installed on the Turtlebot, jeopardizing its consistency. This evaluation would provide insights on
how much the Turtlebot was affected in terms of consistency with the additional modifications.
2. Test Procedure
During the second sprint, we had only 3 destinations available for the Turtlebot whereas, during the third sprint,
our destinations grew to 10. For each hub-to-point-of-interest (where the hub is the starting position of the Turtlebot) journey, 20 tests were carried out to
measure the time taken for the Turtlebot to travel (after receiving the command to move to the destination)
from its hub to the specified destination. We then calculated the average of the travel times for each journey,
and plotted the deviation of each test from its respective average journey time. In the graph on the left, we have the tests for the second sprint,
and on the right we have the tests for the third sprint.
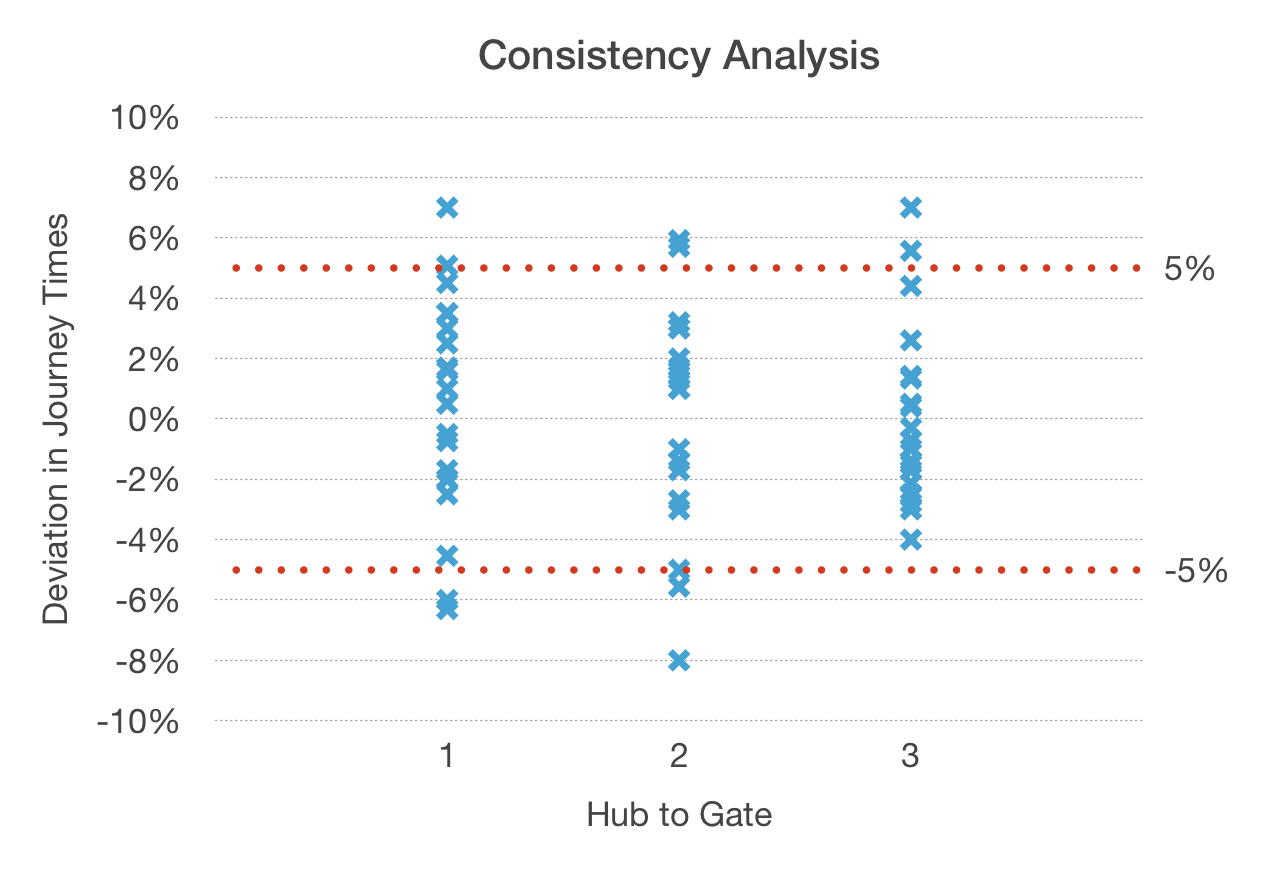
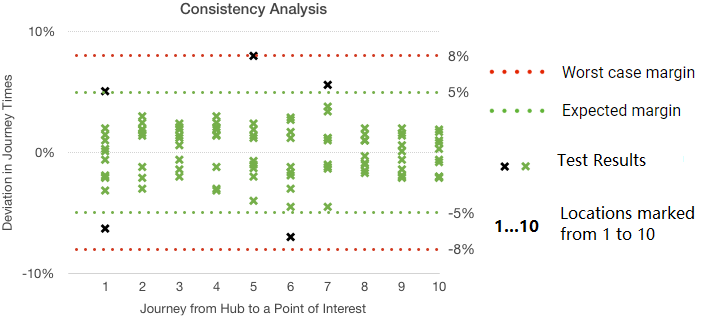
3. Test Results
From the analysis, we can observe that most of the travel times for each journey deviated from their
respective averages in the margin of 5%. Furthermore, the consistency of the Turtlebot in terms of travel time remained stable.
Our product's time consistency is of major importance, as for customers to trust our product in a real-world scenario,
we need to ensure that it is reliable and capable of carrying passengers to their destination on time.
Accuracy of the Final Position for Each Journey
1. Test Purpose
The last step was to evaluate the accuracy of the Turtlebot's final position (coordinates given in the database) from the actual, tested final position for each journey.
Have in mind that during our navigation parameter tuning, we manually allowed the Turtlebot a tolerance of 25cm to reach the destination (using the xy_goal_tolerance parameter),
meaning that within a 25cm radius of the given coordinates the Turtlebot would stop and assume it has reached its destination.
2. Test Procedure
For each hub-to-point-of-interest journey, 20 tests were carried out. When the Turtlebot reached the destination,
we recorded its position and calculated the difference between the given coordinates and the actual coordinates.
Note that the distance the Turtlebot traveled, on any journey, was between 1.5m to 5.5m.
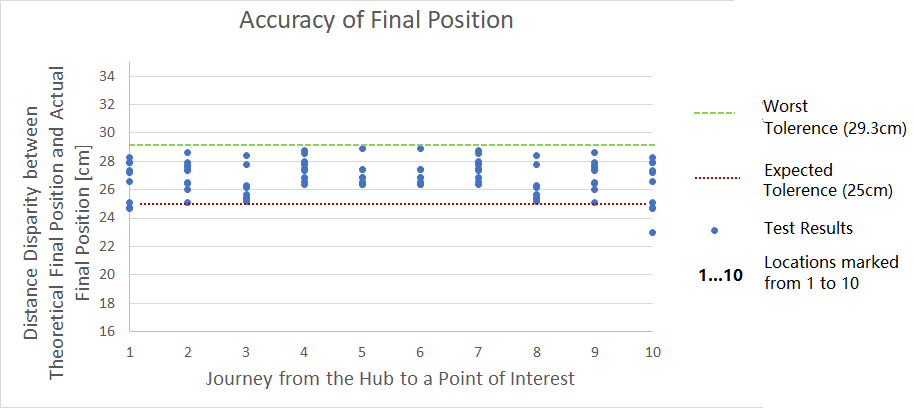
3. Test Results
Our measurements show that the maximum difference in disparity we get is 5cm, which we deem to be acceptable.
In a real-world scenario, our product will be scaled up, meaning that these measurements will change. However,
we estimate that the accuracy of the localization of the Turtlebot will not, as the same principles will be used even
if the distance traveled is larger. We allow a minor tolerance for the Turtlebot keeping in mind that there isn't a
specific spot for the airport point-of-interest but rather a general area for the user to arrive at.
UI User Testing
1. Testing Procedure
We tested our user interface on 5 participants over the age of 50.
We gave context to the UI by explaining what IAN is and what it does physically.
We then asked the participants to think aloud (using the think-aloud protocol) while using the UI and then asked them the
following directed questions:
• Did you find anything confusing or misleading?
• At any point were you stuck?
• What did you think of the design?
• Do you have any other comments or suggestions?
2. Findings
All of the participants found the help pages easy to follow, and at no point were any of them were stuck.
Some of the participants noted their appreciation of how simple the design was. 4 out of the 5 users found
the concept of the pause button confusing, and 2 users were also confused by the map on the UI.
Some users provided suggestions for improvement on the text content of several of the UI buttons or pages,
most of which we have already incorporated into the UI:
• 'Take Me Somewhere' → 'Go Somewhere'
• 'Goal' → 'Destination'
• 'Your Info' → 'Your Flight'
• Add personal messages such as 'Enjoy your flight, {name}!'.
• Add a comment on the 'Where' page which informs the user that they will be able to change their mind on the destination.
• The airport help desk should be a destination option.
3. Improvements
We learned from our testing that we took for granted intuitive understanding of common design elements.
Many features of our UI weren't confusing for us (the team) or our peers (others on the course), but they
were for the older people we tested on - those who aren't as fluent with technology. So we decided to make
the following changes to help even the most technologically illiterate understand IAN and to use the system with confidence:
• A 'Welcome to IAN' screen and two short introduction screens to familiarise new users with IAN.
• A friendlier message asking users to scan their boarding pass, and introducing the functionality of the help and exit buttons.
• Calling the user by their name once their flight details have been retrieved, and wishing them a safe flight once their journey
is over makes the system less intimidating and more personal.
• Changing the 'Take Me Somewhere' button to the clearer 'Go Somewhere'.
• Renaming 'Your Info' to the 'Your Flight'.
• Warning the user IAN will begin moving once they confirm their destination.
• Changing the 'Pause' button to one that uses the word pause instead of the pause symbol for more obvious functionality.
• Always showing the 'New Goal' button to the user.
• Providing confirmation to the user once they have reached their destination.
Current System Costs
The total cost of items borrowed in the making of the system is £1,645.80.
The breakdown of the borrowed items' costs is shown in by the following pie chart.
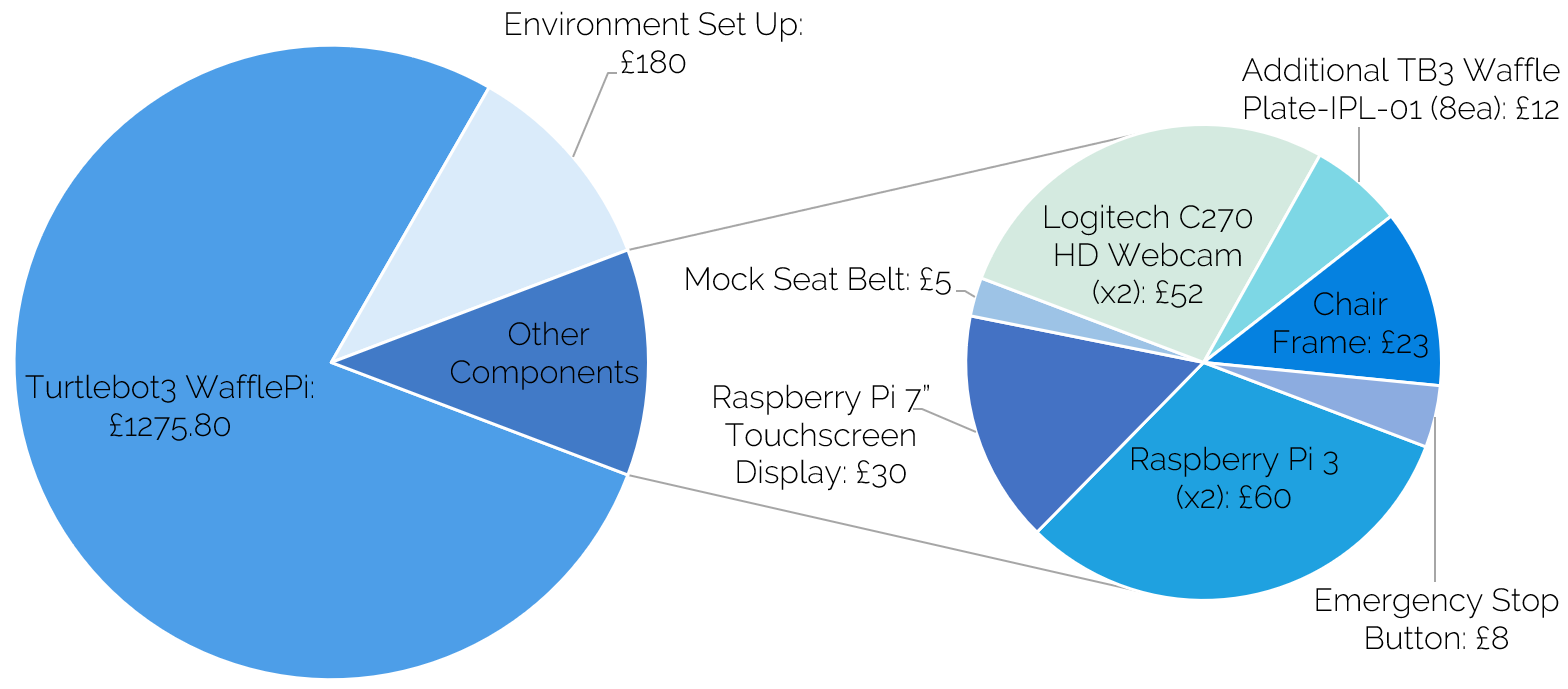
Our externally purchased items' budget is £200. The total cost of our
externally purchased items is £36.30, and is broken down by the following piechart.
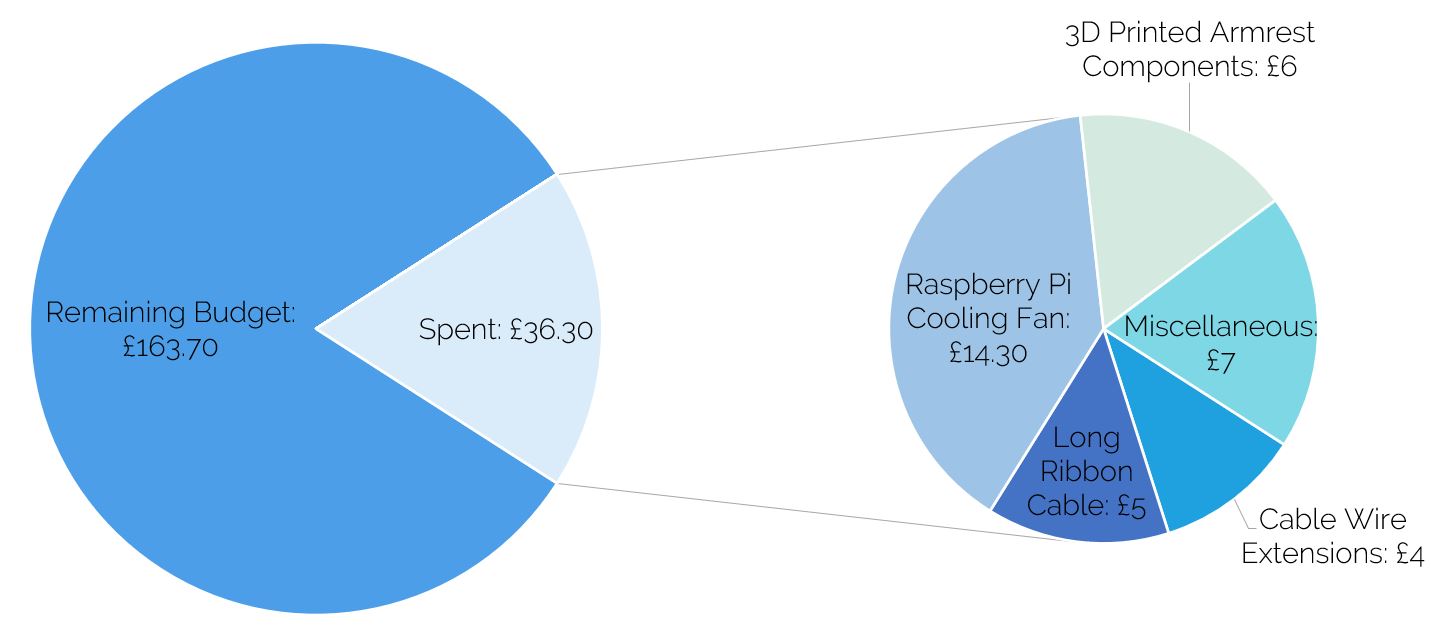
For our final demo, we planned on including a footrest for the passengers, as well as focussing on aesthetics such as covering for the armrests, cushioning for the chair and wire concealment. We also planned to include text-to-speech features and warning lights to alert other passengers who may come in the way of the system. We estimate that this would cost an additional £20 - £25.
Technician Budget
Given a budget of 10 hours, we estimate we spent 4.5 hours collaberating and working with the technicians. Broken down, this includes:
• Printing 3D components: 1 hour.
• Cutting wood and drilling holes for chair frame: 1 hour.
• Meetings, discussions, and further assistance: 2.5 hours.
Business Plan
1. Current Human Service Cost
We start by making a few assumptions about the market:
• According to the UK Civil Aviation Authority,
there was a record number of 3.7 million requests for assistance at UK airports in the latest year.
• We presume it takes one airport staff member a working hour to fulfill such an assistance request.
• According to Glassdoor, British Airways' customer service staff on the ground make between £10-13/hour. We will presume it's £15/hr for the sake of making a safer estimate.
We presume that our product can only fulfill half of those requests, which are 1,850,000 requests a year. Given those assumptions, we estimate the cost of responding to those 3.7 million requests to be 1,850,000 x £15 = £27,750,000.
2. Product Units Estimate
We now have to make assumptions about the units of the product we would produce per annum.
Considering there are 3.7 million mobility assistance requests per year (365 days), that amounts to around 10,136 such requests a day.
We made the assumption here that our product can only cater to half of those, so 5,000 requests a day.
If we also presume a completely uniform distribution of those requests on the 24 hours of the day, we arrive at 208 requests per hour.
To recap, that is 208 mobility requests that our product can fulfill per hour around the UK.
Therefore, it makes sense to produce 208 units in the first year and release 208 of the enhanced version of the product each following year.
3. Deployment Costs: Fixed Costs
Staff Costs:
• FTE 1.0 – CEO (strategy/governance) – Salary Costs = £35,000 pa.
• FTE 1.0 – CTO (technical) – Salary Costs = £35,000 pa.
• FTE 1.0 – Engineer (robotics) – Salary Costs = £30,000 pa.
• FTE 1.0 – Software Developer – Salary Costs = £30,000 pa.
• FTE 1.0 – Sales Manager – Salary Costs = £25,000 pa.
• Employers contributions (for staff, e.g., pensions, bonuses, employers NI, appreciation about 20% of staff costs): £26,000 pa.
Lease / Rent / Office Space Costs: £20,000 pa.
Equipment Lease (e.g. long-term equipment for building robots etc.): £15,000 pa.
Insurance (liability, indemnity, employers, buildings cover, contents & stock, legal expenses, theft, criminal damages, etc.): £2,000 pa.
IT (software, computing equipment, data storage, etc.): £15,000 pa.
Therefore, we project our fixed costs to have a rough total of £233,000 per annum.
4. Deployment Costs: Variable Costs
Inbound Logistics - materials required for robots:
• Motorized wheelchair: £600-£2000.
• Motherboard with CPU unit, fan and the display screen: £600.
• Barcode Scanners: £15-29.
• Light/weight sensors: £2-7.
• LIDAR sensor £146.
• Total for each unit: £1360-2780.
• We will take the total for all units (208) to be the upper bound of all the costs above.
• Therefore, the inbound logistics total is £2780 x 208 = £578,240 per annum.
Operational Costs - production costs:
• N/A as it's covered in the fixed costs.
Outbound Logistics - delivery/handling costs:
• Looking at other companies' delivery costs of equipment of similar weight,
we project the delivery and handling costs to be around £40 per unit, which's a fairly cruel estimate.
• Accounting for the delivery of 208 units, the outbound logistics total comes to around £40 x 208 = £8,320 per annum.
Customer Services - labour costs:
• We are assuming that our product will have a failure tolerance of 2%, meaning
that out of our 208 units, 4-5 will be faulty and need replacement or reimbursement. We will take that number to be 5.
• Therefore, the total Customer Service costs for is 5 x(£2780 + £40) = £14,100 per annum.
Therefore, the total variable costs per annum are projected to be £600,660.
5. Revenue Streams
To recap, our total costs are around £833,660 per annum.
This is only around 3% of the £27,750,000 cost of human assistance.
We first assume the purchasing option would be narrowed down to purchasing each unit independently,
at least to begin with. Given the extensive use we predict for the product and the high safety standard it has to hold,
we assume a shelf life of 1 year.
Since our total costs per annum are estimated to be
around £833,660 assuming the production of 208 units (i.e. £4,007 per unit),
we will set the price of the first purchase to be £5,500 per unit.
If the customer wishes to purchase the product again in the following year,
we ask them to return the used product back to purchase the new product for a price of £5,000 per unit.
We assume the disparity of that £500 is made up of recycling or using parts of the used product.
Assuming the sale of 208 such units a year,
the revenue stream should be around £1,144,000 per annum.
This makes for a profit of roughly £310,340 per annum.
6. IAN's Cost vs Human Cost
Assuming the 208 unit sale per year, the overall customer cost
would be around £1,144,000 per annum which is only 4% of the
human cost per annum. That means a reduction of special assistance related costs of 26.6 million.
Team Members and Contributions

Navigation
Co-managed the team: responsible for task allocation and planning. Lead the navigation team, and was responsible for the navigation functionalities and ROS programming. Co-developed the promotional website.

DB/Scanning
Co-managed the team. Contributed to the writing of technical reports and the userguide, website development, the early steps of navigation scripting, and the building & integrating of the database and scanning functionalities.

UI
Backend developer for the UI. Wrote the UI scripts, helped design the UI and integrate it with the other subsystems, carried out user testing, and also demo-ing the project.

Appearance
Member of the appearance team. Tasked with designing how the system would look and implementing such designs. Also contributed to the writing of reports, the user guide and slides for demonstrations.

Appearance
Member of the appereance team. Worked to design and develop how the system would look like. Also worked on setting up the development environment and provided technical assistance when needed.

Navigation
Member of the navigation team. Helped with creating scripts for navigating and pausing functionalities. Also worked on integrating the navigation with the UI.

DB/Scanning
Member of the DB/Scanning team. Worked on developing the scanning scripts, the live updates functionality and making the Database. Also integrated the scanning and live update functionalities with the UI.
Navigation
Contributed to running the evaluation tests and analysis as well as presentations. Also contributed to user testing by managing the ethics application.

UI
Member of the UI team. Designed the UI and helped integrate some of the UI's features with other parts of the system such as live updates and navigation functionalities.
Appearance
Contributed to the database setup, evaluations, research and writing of the technical reports and the user guide.
Team Organisation
Agile Development
Due to the nature of this course and its assessment structure, which included product demonstrations every 3 weeks, we decided to go with an agile development methodology. This method is based on iterative development,where requirements and product enhancements are influenced by regular feedback from the expert team.
Trello
For our agile development management, we decided to use Trello.
Using Trello, individuals were assigned tasks with specific deadlines.
We used "To Do", "In Progress" and "Done" boards to keep track of the status of each task.
Communication
We decided that the main medium of communication should be Slack as
it provided us with the option of creating channels for sub-groups within the
team for better communication as well as having different channels
for different content (e.g meeting related).
Weekly meetings
Team meetings and meetings with our mentor took place on a weekly basis.
The meetings were co-lead by our managers and their purpose was to keep the
team updated on the progress of the product. In the meeting, each team would
present their completed tasks and then we would break down the milestones of
the sprint into tasks, and would arrange ourselves into teams depending on the
ongoing tasks. Most teams remained the same across various sprints and some teams
were rearranged when needed. During the meetings, our Trello meeting would be updated to keep track of in-meeting decisions.
Code Repository
We decided to use GitHub for our code-sharing and version control so that
each team member could have access to the product's code. For example, the User Interface
team had their own branch to tests their potential features before merging with the main branch.
SCRUM
To keep every member of the team up to date with other members' work, the team had daily
scrums over Slack. The 'scrum window' lasted for 2 hours. In this window, each member
wrote what they had done since the last scrum, what they were currently working on,
and what they'd work on next. Daily scrums allowed all members of the team to be aware
of problems immediately, instead of delaying problems to the weekly meetings.
Nuclino
At the end of each sprint, each team wrote a Nuclino page
with instructions on how they accomplished their tasks and
problems they faced, alongside their solutions and likely causes.
If a member of the team became unavailable at any
point in the future, other members of the group could pick up
where they left off by following the steps they documented.
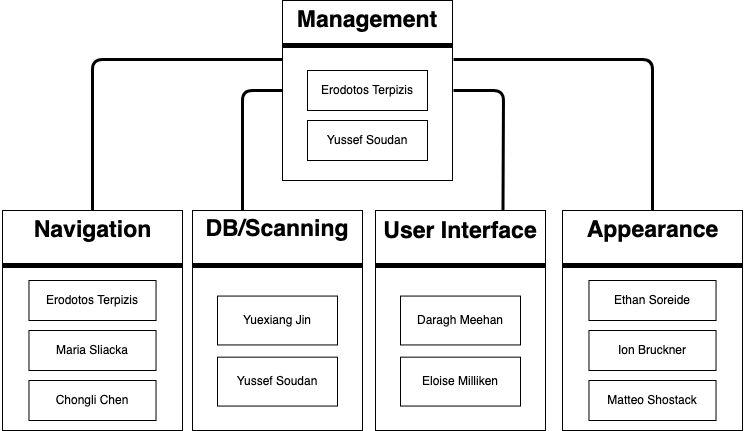
Team Structure
Sprints & Accomplished Milestones
| Sprint 1 Milestones | Team |
|---|---|
| The physical environment for the robot is set up, and the Turtlebot can be moved manually. • Made a map of the environment using SLAM. • Could move the Turtlebot using RViz manually by pointing to a destination. |
Navigation, Appearance |
| The robot can scan a boarding pass in the form of a QR/Barcode code. • Built and populated an early version of the DB locally. • Obtained a camera that is able to auto-focus on the codes. |
DB/Scanning |
| Sprint 2 Milestones | Team |
| The user can interact with the robot using an interface (UI) on a display screen. • A screen is installed and the user interface is created. • The UI is integrated with the navigation functionalities. |
UI |
| The robot can move from any point in the airport to a predefined point, such as a gate, automatically. • Coordinates of destinations in the map are stored on the DB. • Could move the Turtlebot automatically to a destination by running a Python script. • By clicking a button on the UI, the Turtlebot can move to a pre-defined destination on the map. |
Navigation, UI, DB/Scanning |
| The robot avoids static obstacles while moving in a smooth manner. • Changed the navigation parameters for the obstacle avoidance to be more smooth. |
Navigation |
| The foundations of the user seat are built (i.e. the frame). • The foundation of the seat is built using wood and metal frames. |
Appearance |
| Sprint 3 Milestones | Team |
| The robot can take the user to restaurants, toilets and other points of interest. • More destinations are added to the map, stored on the DB and integrated with the UI. |
Navigation, UI, DB/Scanning |
| The UI is further enhanced for increased accessibility. • Text sizes are revised to accommodate for the target group. • Colours are revised to accommodate for colour-blind users in the red-green spectrum. |
UI |
| The database is setup on a remote server. • The database is setup on the 'Server Pi' to imitate an airport server. |
DB/Scanning |
| The user can receive live updates on their flight status. • When any of the user's flight information is altered on the DB, the user recieves a pop-up on the UI. |
DB/Scanning, UI |
| The user can pause the navigation process via the screen. | Navigation, UI |
| The user can see a live, dynamic map which tracks their position on the airport’s map. • The live-tracking feed shows the user's, and hence IAN's, position on the map as it changes as well as their chosen destination on the map. |
Navigation, UI |
| The seat has an armrest and a seat belt. | Appearance |
| Research the scalability of the navigation and the database. • The navigation team researched other navigation algorithms suitable for the current hardware to make for safer and more efficient journeys. • The DB/Scanning team researched other methods for server-client communication for enhanced security, such as TCP sockets. |
Navigation, DB/Scanning |
| Sprint 4 Milestones | Team |
| Writing the user guide. • Each subteam wrote a page listing the setup instructions for their component. • Three members of the team wrote the actual user guide by compiling those pages. • The UI team designed the user guide cover. |
All teams |
|
Making the promotional and system demonstration videos. • Different members of the team worked on the making and revision of each video. |
All teams |
| Making the website. • Each subteam wrote the relevant subsection for their component. • The managers designed the website and compiled the information written by the team. • The UI team designed the banner. |
All teams |